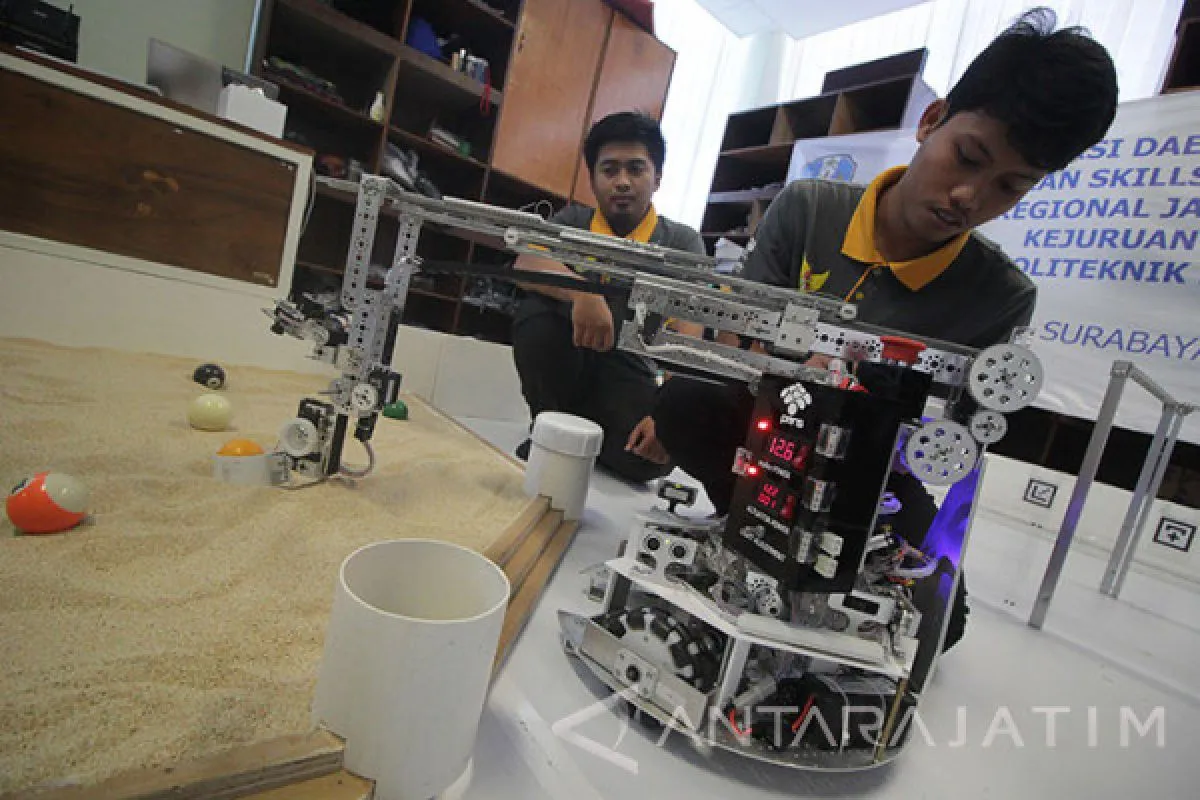
Named Badak V7, the robot picks apples from trees using a combination of sensors and a sophisticated navigation system.
The robot was jointly developed by PENS' Mechatronics and Computer Engineering departments.
"We designed a robot for agriculture that can detect and pick objects ranging from 40 mm x 40 mm x 60 mm to 60 mm x 60 mm x 80 mm in size," said team member Ahmad Yogi Fernanda in a statement received on Thursday.
Fernanda added that the Badak V7 has a flexible body that enables it to operate in various terrains and pick objects of different shapes.
The robot, with its functional design, has been programmed by Fernanda and his team to assist in both the harvesting process and seed planting in agriculture.
"Our robot can transport a basket of harvested crops and even plant seeds. We have refined its key components, such as the base frame, lifter, arm, and gripper, through several versions," he said.
To support its balance and navigation accuracy, the Badak V7 is equipped with two infrared sensors, two ultrasonic sensors, a 3D depth camera, and a gyroscope.
"Infrared and ultrasonic sensors are crucial for maintaining the robot's stability, while Dijkstra's algorithm helps determine the most efficient path for movement," Fernanda explained.
Related news: UI students win EBEC contest with plastic waste reduction plan
Related news: Two Indonesian students win international climate and energy debate
Translator: Farhan N, Kenzu
Editor: Anton Santoso
Copyright © ANTARA 2024











